我们使用机器学习技术将英文博客翻译为简体中文。您可以点击导航栏中的“中文(简体)”切换到英文版本。
提高 亚马逊云科技 上自动驾驶车辆远程操作的可靠性和性能
自动驾驶技术的快速发展正在改变汽车行业,从而提高安全性、效率和便利性。随着自动驾驶汽车的发展,汽车制造商必须应对多项挑战,以确保其得到广泛采用。在这些挑战中,车辆与远程操作中心之间可靠、安全和低延迟的通信对于复杂场景中的实时响应和决策至关重要。
遥控系统与用于控制
在这篇博客文章中,我们探讨了汽车制造商和远程操作提供商如何利用 亚马逊云科技 上的创新技术和服务,提高自动驾驶车辆远程操作的可靠性和性能,为未来更加互联和智能的交通铺平道路。
自动驾驶车辆面临的技术和监管挑战
自动驾驶汽车面临技术挑战,尤其是在道路上的意外情况下。当前的自动驾驶汽车技术难以解决各种问题,包括封路、事故或天气,通常需要人工干预。应对这些挑战的解决方案是人工远程操作,当自动驾驶系统无法处理情况时,训练有素的自动驾驶车辆远程操作员将进行控制。例如,在下图中,你可以看到一条受到大雪影响的道路,交通当局提供的卡车正在清理这条道路,为车辆提供安全通道。在这种情况下,人类驾驶员可能得不到通常的路线和标志的支持,需要听从现场交通人员的指示,与其他驾驶员沟通,并注意一系列不断变化的变量才能安全地克服这种情况,这对于当前的自动驾驶技术来说是具有挑战性的。

图 1:受大雪影响的道路
- 缺乏物理感应:难以估计加速度、速度、道路倾角或踏板反馈
- 人类认知和感知:需要持续的态势和空间意识、认知负荷管理、深度感知和心理模型发展
- 视频通信和质量:延迟和可变性、帧速率低、视频分辨率差、图像拼接缺失或摄像头未校准
- 与人类的远程互动:与乘客、其他司机、行人和机构代表进行沟通
- 能见度受损:视野 (FOV) 和几何视场有限、缺乏周边视觉、视角固定、光线条件变化
- 缺少声音:没有环境声音、来自其他实体的声音和内部声音
因此,物理感知、认知超负荷以及视频通信和质量是远程操作的首要问题,后者是本篇博客文章的重点。将人类远程操作集成到自动驾驶系统中需要强大的通信和数据传输系统,以支持车辆与远程操作员之间的近乎实时的通信,延迟比
自动驾驶技术的快速发展促使
在这些领域,像 WebRTC 这样的技术与 亚马逊云科技 服务相结合,是有益的。WebRTC(Web 实时通信)为应用程序提供低延迟、实时视频/音频通信功能,而 亚马逊云科技 则为远程操作系统运营商提供可扩展且安全的基于云的基础设施,他们可用于传输和处理应用程序数据。在下一节中,我们将简要概述不同背景下远程操作的历史和当前状态。
WebRTC:远程操作的实时通信
基于网络的远程控制已经发展,供应商和开源社区正在开发新的技术和协议,以实现更复杂、更可靠的远程控制应用程序。该领域的基本技术之一是
WebRTC 是一种开源技术,支持通过 Web 进行实时通信,包括音频和视频聊天、文件共享和数据传输。WebRTC 的关键功能之一是它支持点对点通信,这允许在没有集中服务器的情况下在两台设备之间进行直接通信。
WebRTC通过促进安全高效的实时通信,对远程医疗、在线教育和远程工作行业产生了重大影响,其在我们互联世界中的重要性只会增加。
WebRTC 的主要功能
WebRTC 拥有多项功能,使其成为实时通信的理想选择,对于自动驾驶汽车的远程远程操作至关重要,正如我们将在下一节中看到的那样。
点对点连接
如前所述,WebRTC 的关键功能之一是直接点对点连接,即使它们位于网络地址转换器 (NAT) 或防火墙后面。我们可以在下图中看到连接过程。
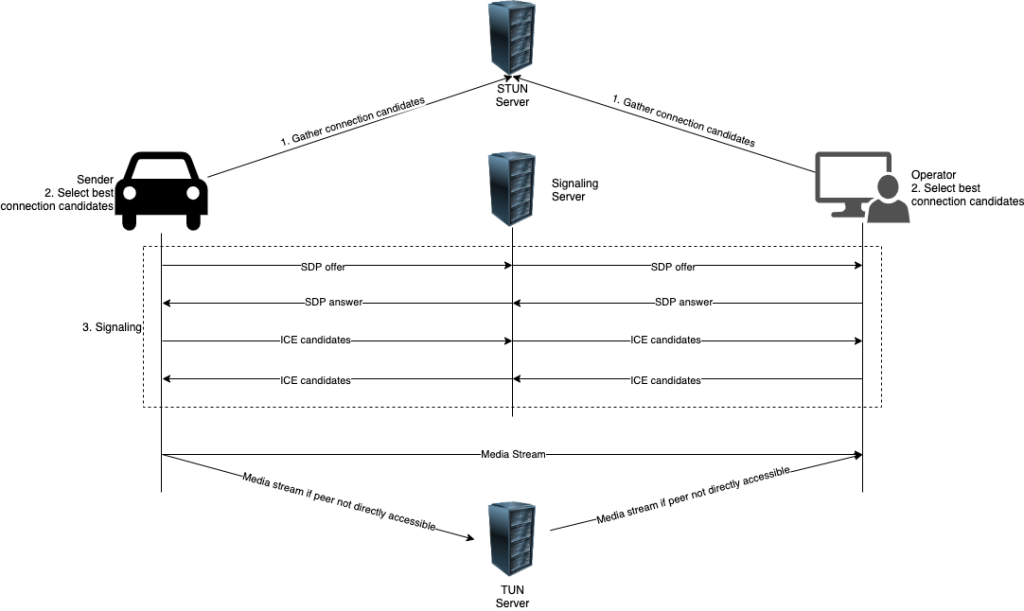
图 2:WebRTC 连接步骤
WebRTC 使用一系列协议和算法来建立对等方之间的最佳网络连接路径。首先,对等方收集不同网络中的应用程序所看到的 IP 地址,选择最佳的候选连接,然后与对等方协商传输协议、网络地址和端口。如果无法直接连接,则两个对等体都使用中继来绕过连接问题。
建立点对点通信而不是客户端-服务器架构的设计决策具有多种优点:
- 与客户端-服务器架构相比,延迟更小
- 它移除了所有中间组件,因此可以使连接更加安全
- 由于它不需要中央服务器,因此不需要中央基础设施及其相关操作,因此更具成本效益
- 它可以更轻松地扩展以满足不断变化的业务需求
这些观点在很大程度上解释了WebRTC在许多实时通信用例中取得的成功。
支持多个视频和音频编解码器 视频编解码器
会影响实时通信质量、延迟和带宽需求,这些编解码器会压缩和解压缩视频数据以实现高效传输。WebRTC 规范没有规定特定的编解码器,
每种编解码器都有优点和缺点,使其适用于不同的实时通信场景。一项
因此,正如我们从这些示例中看到的那样,编解码器的选择不仅是一个关键的选择,也不是一个容易的选择。这里的实验是关键。同样重要的是要考虑许可的差异,什么可能对编解码器的选择起到作用,因为有些是免版税的(VP8、VP9和AV1),有些则不是(H.264和H.265)。
数据通道
WebRTC 的数据通道支持对等方之间任意数据的双向通信。WebRTC 设计人员将其实现为与音频和视频频道配合使用,无需单独的连接或服务器即可交换控制信号、短信或文件。数据信道在与音频和视频通道相同的点对点连接上运行,使用相同的 NAT 遍历技术和安全措施。但是,它独立运行,允许根据用例进行性能自定义。在自动驾驶车辆的远程操作中,数据通道对于在远程操作员和自动驾驶车辆之间传输控制信号(包括启动、停止、改变速度或方向或触发紧急操作的命令)至关重要。这些功能便于与车辆进行低延迟通信,确保实时响应并增强系统安全性和性能。
自适应流
媒体
WebRTC 通过根据不断变化的网络条件实时调整媒体流质量来实现自适应流媒体,从而确保一致的用户体验。它采用
低延迟
WebRTC 利用点对点 (P2P) 功能、自适应流式传输和高效传输协议(例如用户数据报协议 (UDP))来提供设备之间的低延迟通信。建立 P2P 连接消除了对中间服务器的需求,从而减少了延迟。自适应流媒体允许 WebRTC 根据网络条件调整媒体质量,确保以最小的延迟实现流畅的流式传输。
UDP 在实现 WebRTC 的低延迟方面起着至关重要的作用。与传输控制协议 (TCP) 不同,UDP 是无连接的,开销较低,因此数据包传输速度更快。使用 UDP 作为底层传输协议,WebRTC 可以以最小的延迟提供音频和视频流,从而实现实时通信。
先前的所有功能为我们提供了整个链条的以下画面,从视频捕获过程到将其显示在操作员屏幕上,也称为玻璃到玻璃的视频延迟:
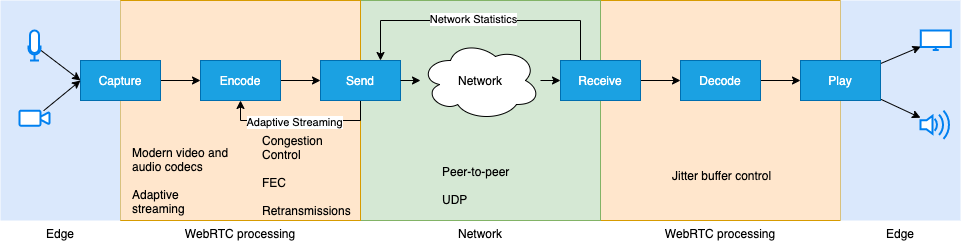
图 3:解决玻璃间延迟的 WebRTC 关键功能
结合 P2P 连接、自适应流媒体和基于 UDP 的传输,WebRTC 还可以管理抖动缓冲区并实现错误恢复机制,即使在困难的网络条件下也能保持低延迟通信。当视频包通过互联网到达时,抖动缓冲区会将其排队,以便为最终用户提供更流畅的体验。随着对等方之间的互联网网络路径不断变化,视频包可能会出现延迟或乱序到达,而抖动缓冲区有助于缓解这些情况。由于抖动缓冲区如果过深,则会增加更多延迟,因此在改善最终用户体验的同时将延迟保持在实时远程操作的阈值之内之间存在细微的界限,这使得抖动缓冲区调谐成为基于 Webrtc 的系统中的另一个关键要素,适用于远程操作。
总而言之,要成功实施用于自动驾驶远程操作的WebRTC解决方案,关键是要专注于三个基本组成部分:
-
客户代码:远程操作提供商必须使用高效而强大的客户端代码开发远程操作系统,以管理视频、音频、数据流和所有与网络相关的优化。亚马逊云科技 为客户提供软件开发套件 (SDK),请查看我们的
亚马逊 Kinesis Video Streams WebRTC 开发者指南。 - 支持服务器:建立高度可用的基础架构,以促进对等通信、管理用户身份验证和处理网络遍历。
- 对等点之间可靠、低延迟的网络路径:实现可保证对等点之间最小延迟和高质量数据传输的网络路径。
在下一节中,让我们看看汽车制造商和远程操作提供商如何使用 亚马逊云科技 服务创建远程操作解决方案,以帮助应对自动驾驶的挑战并帮助提高自动驾驶汽车的整体可靠性和性能。
使用 亚马逊云科技 服务和合作伙伴解决方案为远程操作构建可靠的低延迟网络
通过结合使用 亚马逊云科技 服务和 亚马逊云科技 合作伙伴解决方案,远程操作系统提供商可以在自动驾驶车辆和远程运营商之间建立更可靠、更低延迟的网络。本节将介绍关键解决方案,例如
带有 WebRTC 的亚马逊 Kinesis Vid
eo
亚马逊云科技 Direct Con
亚马逊云科技 D
亚马逊云科技 合作伙伴解决方案
亚马逊云科技 与
将 MNO 私有网络与使用 亚马逊云科技 Direct Connect 直接连接到 亚马逊云科技 网络相结合,我们可以拥有一个端到端的低延迟网络,如下图所示:
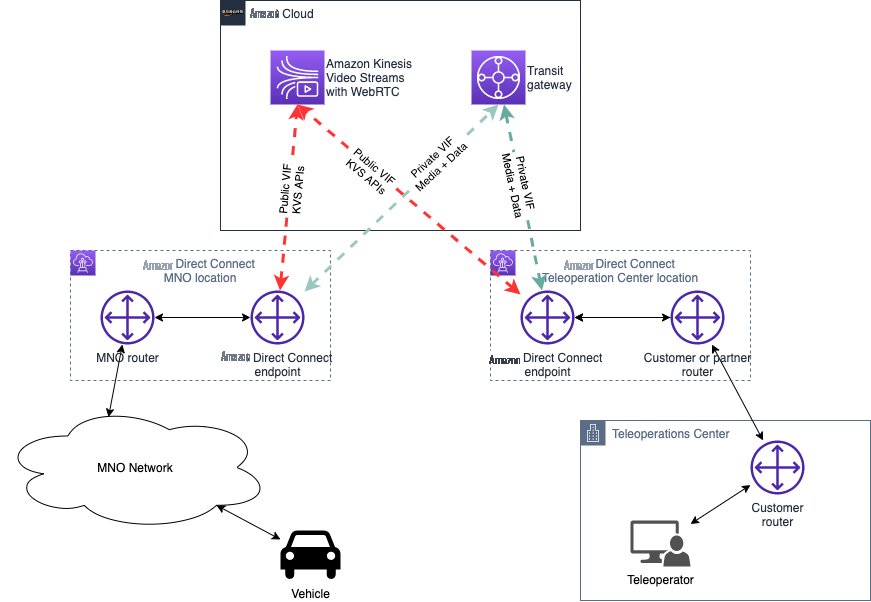
图 4:端到端网络连接概述车辆-云-远程操作中心
通过利用带有 WebRTC 的 Amazon Kinesis Video Stream、Amazon Direct Connect 以及 亚马逊云科技 合作伙伴解决方案等 亚马逊云科技 服务,您可以为远程操作构建更可靠、更低延迟的网络基础设施。这种服务和解决方案的组合可帮助客户在自动驾驶车辆和远程操作员之间建立更无缝的实时通信,这有助于增强汽车客户提供的自动驾驶解决方案。
结论
总之,远程操作对于开发和集成自动驾驶技术至关重要。它们是人类操作员和自动驾驶车辆之间的关键纽带,有助于汽车制造商为其自动驾驶汽车提供更可靠、更无缝的操作。随着自动驾驶汽车行业的发展,应对与远程操作相关的挑战变得越来越重要,特别是在通信、性能和安全方面。
在远程操作中,利用 WebRTC 和 亚马逊云科技 服务可以为客户及其为最终客户提供的解决方案带来许多好处,包括实时视频流、可靠通信、低延迟数据传输和可自定义的网络配置。汽车公司可以创建更强大、更高性能的远程操作基础设施,通过部分使用诸如带有 WebRTC 的 Amazon Kinesis Video Streams、Amazon Direct Connect 以及 亚马逊云科技 合作伙伴解决方案等服务,帮助提高其车辆的效率和整体性能。
通过
*前述特定亚马逊云科技生成式人工智能相关的服务仅在亚马逊云科技海外区域可用,亚马逊云科技中国仅为帮助您发展海外业务和/或了解行业前沿技术选择推荐该服务。